Low Cost Gait Rehabilitation Robot
- Category: Web design
- Company: REWIRE Laboratory
- Project date: Summer - Fall 2015
- Language: MatLab
- Project URL: https://tinyurl.com/yyufz8ws
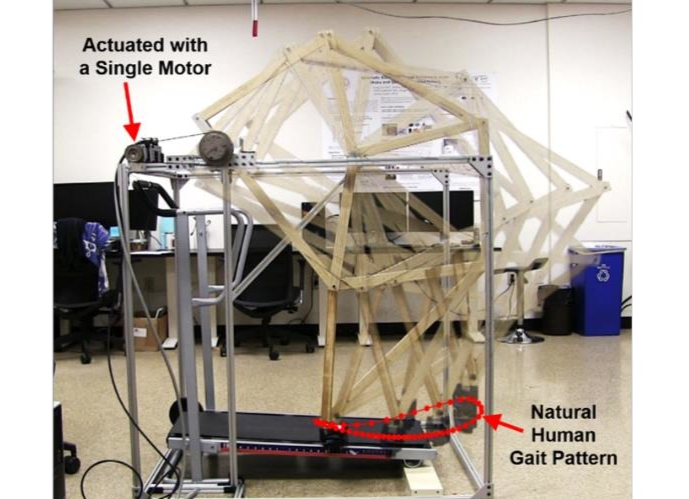
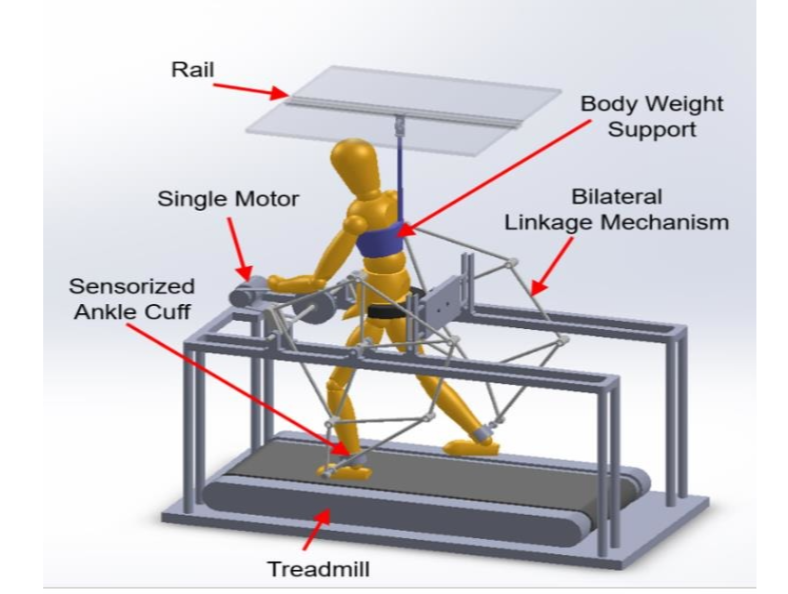
In this project, using MatLab I developed software to calculate the linkage lengths necessary to create the motion path for a patient's natural gait. I also fabricated the prototype and integrated the motor into the setup.
The purpose of this project was to help post stroke and post spinal cord injury victims learn to walk with their natural gait again. However the caveat is that the lab's goal was to do this at a fraction of the cost of commercial gait trainers which cost around $1 million, and this prototype was implmented at around $1 thousand.